Iniciamos con este primer blog de protección de motores. El motor de inducción de corriente alterna es el impulsor de los procesos industriales, prácticamente cualquier parte en movimiento de un proceso industrial es movido por un motor de inducción de corriente alterna, la protección de este elemento contra condiciones anormales de operación y fallas de corto circuito es de suma importancia para la continuidad de la operación de los procesos. El estándar de referencia para la protección de motores en sistemas industriales es el IEEE Std 3004.8™-2016 Recommended Practice for Motor Protection in Industrial and Commercial Power Systems.
A pesar de que el modelo eléctrico de este elemento es complejo, el estándar de protección de motores utiliza una manera relativamente sencilla de representar el comportamiento típico del motor desde el arranque, aceleración y hasta que toma su corriente nominal junto con las funciones de protección, usando hojas estándar de coordinación de protecciones.
En este blog veremos las condiciones anormales de sobrecarga y corto circuito. Cabe señalar que aunque existen diversas maneras de arrancar los motores, desde el punto de vista de protecciones, se utilizan los parámetros relacionados con el arranque a tensión plena (factor de servicio, corriente de rotor bloqueado y tiempo permisible a rotor bloqueado). Cuando el motor es controlado por un variador de velocidad no se utiliza la aproximación del comportamiento que veremos en este blog.
En la fig. 1 se muestra en una hoja de coordinación de protecciones el comportamiento de un motor de corriente alterna el cual es arrancado a voltaje pleno, modelado en el software de análisis ETAP.
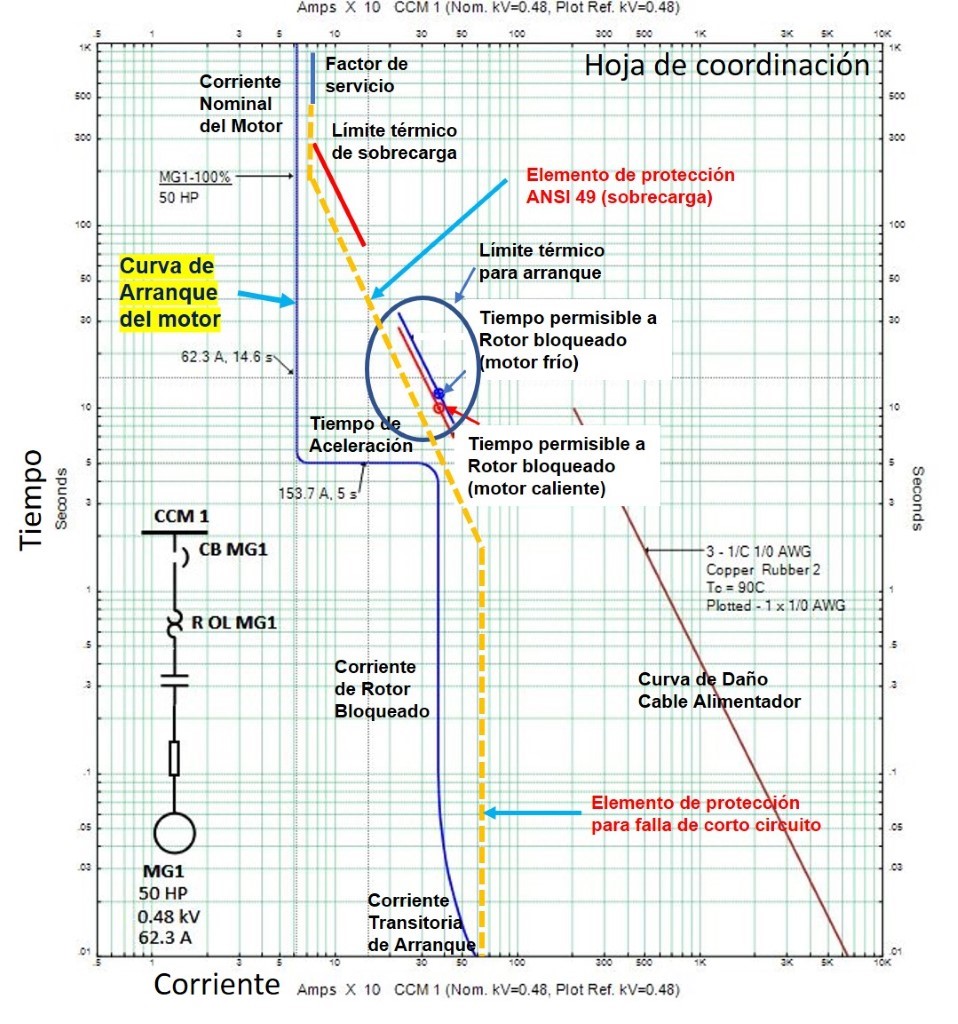
De la figura 1 se presentan las siguientes definiciones de parámetros eléctricos de diseño del motor (proporcionados por el fabricante en la información técnica del motor).
Factor de servicio: es el factor de sobrecarga que puede ser aplicado a la potencia nominal de motor bajo las condiciones especificadas para el mismo, sin que el motor sufra ningún tipo de daño o deterioro. Generalmente este factor es relacionado con la corriente nominal del motor y tiene un valor típico entre 1.05 y 1.25.
Corriente de rotor bloqueado: es la corriente que toma el motor cuando está detenido y se le aplica su voltaje nominal. La corriente típica de rotor bloqueado para el universo de motores está en el rango entre 4.00 y 7.50 veces la corriente nominal del motor. En el primer ciclo del voltaje aplicado se desarrolla la corriente transitoria de arranque que es mayor a la corriente de rotor bloqueado.
Corriente transitoria de arranque: cuando un motor está detenido y se le aplica su voltaje nominal, en el primer ciclo del voltaje de alimentación y de manera natural toma una corriente que es un múltiplo de la corriente de rotor bloqueado. El factor máximo de la corriente transitoria de arranque es 1.6 veces la corriente de rotor bloqueado.
Tiempo de aceleración: es el tiempo requerido para llevar a la carga a su velocidad de operación.
Límite térmico (frío): es una curva tiempo máximo permisible (curva de daño) vs porcentaje de la corriente de la corriente nominal fluyendo en el devanado del estator cuando es arrancado desde la temperatura ambiente.
Límite térmico (caliente): es una curva de tiempo máximo permisible (curva de daño) vs porcentaje de la corriente de la corriente nominal fluyendo en el devanado del estator cuando es arrancado desde la temperatura nominal de operación del motor.
Tiempo permisible a corriente de rotor bloqueado: es el tiempo máximo permisible que puede permanecer la corriente de rotor bloqueado a voltaje y frecuencia nominales del motor. Esta coordenada tiempo corriente está situada en la curva del límite térmico frío.
Capacidad térmica del motor: es una curva de tiempo máximo permisible vs el porcentaje de la corriente nominal fluyendo en el devanado del estator cuando el motor está en operación y trabajando más allá de su factor de servicio, generalmente está curva se representa en el rango igual o mayor al factor de servicio e igual o menor que 2.5 veces la corriente nominal del motor.
Protección ANSI 49 (protección de sobrecarga): es el elemento de protección de motor que manda la desconexión del motor para condiciones anormales de corriente en el rango de sobrecarga y arranque no exitoso, es decir igual o mayor que el factor de servicio del motor e igual o menor que la corriente de rotor bloqueado. Ejemplos: relevadores de sobrecarga convencionales, electrónicos y digitales, guardamotores. Para la protección de motores de media tensión, se usan relevadores digitales de protección integral de motores, dentro de los cuales viene incluida esta función de protección.
Protección de corto circuito: es el elemento de protección de motor que manda la desconexión del motor para fallas de corto circuito en el cable alimentador o entre las bobinas del estator, es decir a valores de corriente igual o mayor que la corriente transitoria de arranque. Ejemplos: interruptores termomagnéticos, fusibles de potencia. En la protección de motores de media tensión con relevadores digitales de protección integral, esta función se denomina ANSI 50 para fallas de corto circuito entre fases y ANSI 50N para fallas de corto circuito entre fases y tierra.
ESTÁNDARES:
- IEEE Std 3004.8™-2016 Recommended Practice for Motor Protection in Industrial and Commercial Power Systems.
ACERCA DEL AUTOR:
Ing. Fernando Pérez Ross
Director de operaciones en RADTHINK S.A. de C.V.
Analista senior de sistemas eléctricos industriales.